Um laboratório de quadricópteros com foco em física, modelagem a 1000 Hz, bancada virtual e controlador de voo integrado. Projete, ajuste e analise builds reais antes de tocar em hardware.
Ver no SteamUm laboratório de quadricópteros com foco em física, modelagem a 1000 Hz, bancada virtual e controlador de voo integrado. Projete, ajuste e analise builds reais antes de tocar em hardware.
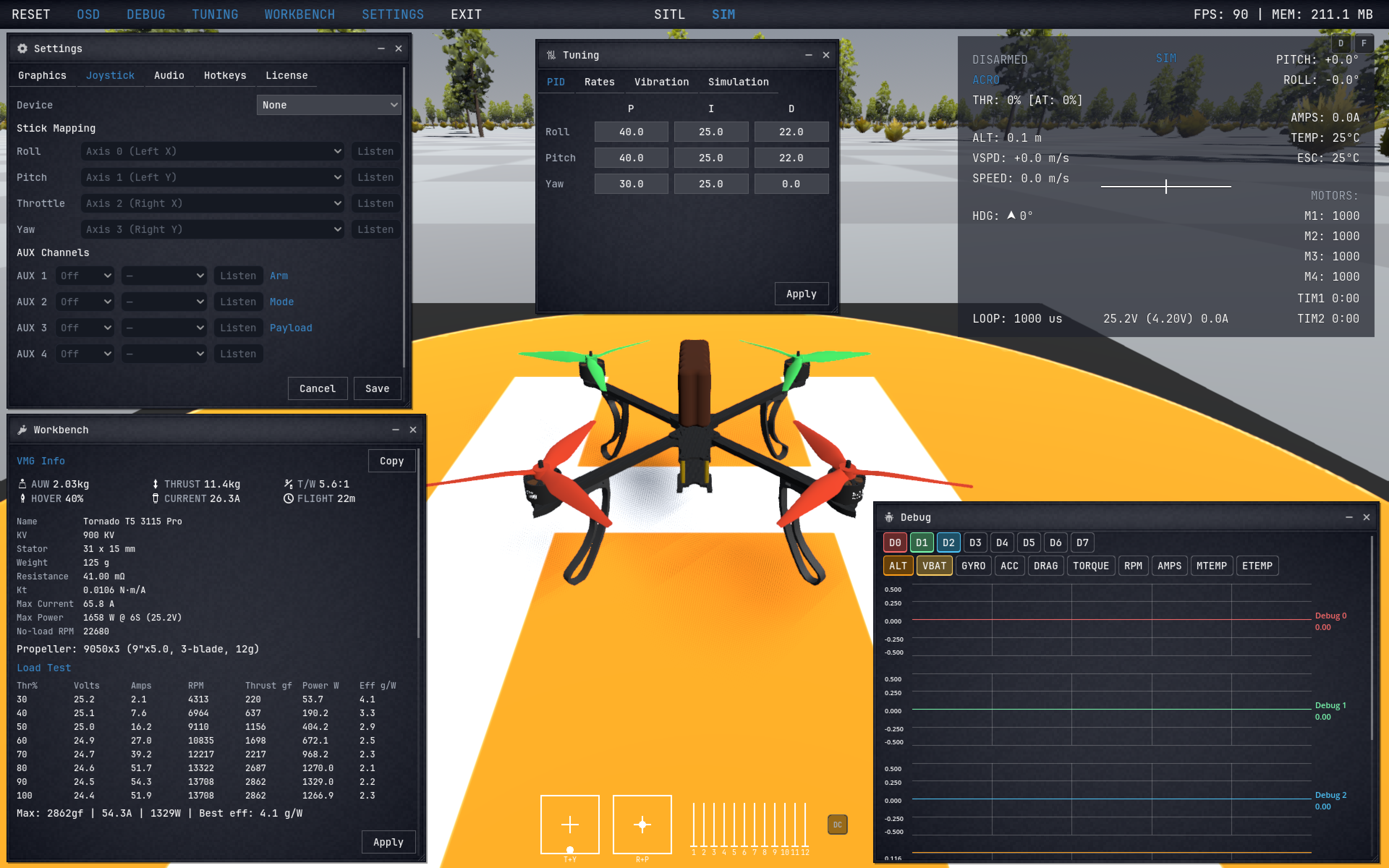
Ver no SteamSITL Forge é um simulador de quadricópteros com foco em física e uma bancada de engenharia. Motores, hélices, baterias e ESCs são modelados a partir de medições reais de bancada a 1000 Hz — o voo simulado segue as tendências que você veria em hardware real.
Valide builds, otimize a eficiência e aprenda tuning de voo com feedback realista — sem crashes, sem componentes queimados e sem desperdício de dinheiro.
Feito para builders que querem saber o que o drone vai fazer antes de soldar qualquer coisa.
Teste combinações de motor e hélice contra ajustes com dados reais de bancada antes de gastar dinheiro em hardware que pode não caber no seu build.
Relação empuxo/peso, consumo de corrente, throttle de hover e tempo de voo previstos a partir de specs reais — nada de chute.
Verifique configurações com payload e builds de airframe pesado com segurança antes de arriscar motores, ESCs ou baterias reais.
Troque um motor, hélice ou bateria e veja empuxo, corrente e tempo de voo recalcularem na hora — sem solda, sem esperar peças chegarem.
Itere sobre PIDs, rates e filtros com feedback sem risco — sem crashes, sem motores queimados, sem hélices quebradas.
Vetores de força, queda de tensão, vibração, temperaturas de ESC e motor — todas as variáveis observáveis em tempo real, não enterradas em uma caixa-preta.
Um simulador base mais DLCs opcionais que servem de ponte para firmwares reais de controladores de voo. Cada DLC é vendido separadamente.

O app base. Projete, ajuste e teste builds reais de quadricópteros antes de tocar em hardware — cada componente ajustado a medições reais de bancada a 1000 Hz.

Ponte software-in-the-loop para o firmware Betaflight. Substitui o controlador PID integrado pelo firmware real rodando no seu PC, então você ajusta contra o mesmo código que roda no seu drone.
Loja Steam
Ponte software-in-the-loop para o firmware INAV. Navegação GPS, missões por waypoints e testes de voo autônomo — a mesma abordagem com foco em física.
Loja SteamPonte software-in-the-loop para o firmware ArduPilot. Configurações multirrotor, asa fixa e VTOL com integração MAVLink completa.
Bancada de engenharia, tuning em tempo real e integração direta com firmware — tudo no mesmo núcleo de física.
Cada produto roda no mesmo núcleo de física — calibrado, reprodutível e construído para precisão.