Un laboratoire de quadricoptères axé sur la physique, modélisé à 1000 Hz, avec atelier virtuel et contrôleur de vol intégré. Concevez, réglez et analysez de vrais builds de drones avant même de toucher au matériel.
Voir sur SteamUn laboratoire de quadricoptères axé sur la physique, modélisé à 1000 Hz, avec atelier virtuel et contrôleur de vol intégré. Concevez, réglez et analysez de vrais builds de drones avant même de toucher au matériel.
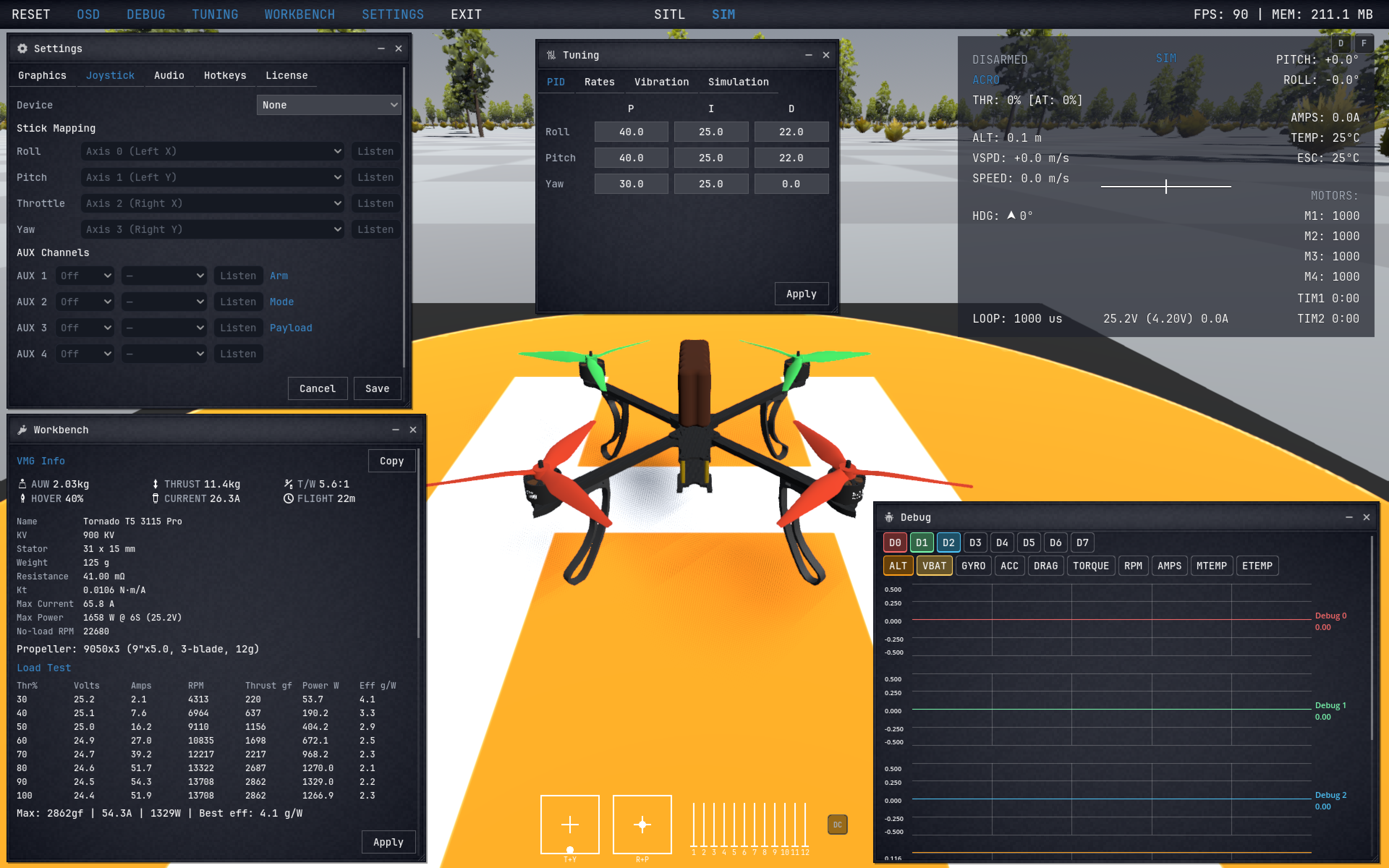
Voir sur SteamSITL Forge est un simulateur de quadricoptères axé sur la physique et un atelier d'ingénierie. Moteurs, hélices, batteries et ESC sont modélisés à partir de mesures de banc réelles à 1000 Hz — le vol simulé reflète les tendances que vous observeriez sur du matériel réel.
Validez vos builds, optimisez l'efficacité et apprenez le réglage du vol avec un feedback réaliste — sans crash, sans composants brûlés et sans dépenses inutiles.
Conçu pour les builders qui veulent savoir ce que fera leur drone avant même de souder quoi que ce soit.
Testez des combinaisons moteur/hélice sur des données réelles de banc avant de dépenser pour du matériel qui pourrait ne pas convenir à votre build.
Rapport poussée/poids, consommation, gaz de stationnaire et autonomie prédits à partir de specs réelles — sans deviner.
Vérifiez en toute sécurité les configurations avec payload et les builds heavy-airframe avant de risquer de vrais moteurs, ESC ou batteries.
Changez un moteur, une hélice ou une batterie et voyez la poussée, le courant et l'autonomie recalculés instantanément — sans soudure, sans attente de pièces.
Itérez sur les PIDs, rates et filtres avec un feedback sans risque — sans crash, sans moteur brûlé, sans hélice cassée.
Vecteurs de force, chute de tension, vibration, températures ESC et moteur — chaque variable observable en temps réel, pas enterrée dans un modèle boîte noire.
Un simulateur de base plus des DLC optionnels qui font le pont vers de vrais firmwares de contrôleur de vol. Chaque DLC est vendu séparément.

L'application de base. Concevez, réglez et testez de vrais builds de quadricoptères avant même de toucher au matériel — chaque composant ajusté à de vraies mesures de banc à 1000 Hz.

Pont software-in-the-loop vers le firmware Betaflight. Remplace le contrôleur PID intégré par le firmware réel tournant sur votre PC : vous réglez donc contre le même code que celui qui tourne sur votre drone.
Boutique Steam
Pont software-in-the-loop vers le firmware INAV. Navigation GPS, missions par waypoints et tests de vol autonome — la même approche axée sur la physique.
Boutique SteamPont software-in-the-loop vers le firmware ArduPilot. Configurations multirotor, voilure fixe et VTOL avec intégration MAVLink complète.
Atelier d'ingénierie, tuning en temps réel et intégration directe au firmware — le tout sur le même cœur physique.
Chaque produit tourne sur le même cœur physique — calibré, reproductible et conçu pour la précision.