Un laboratorio de cuadricópteros con enfoque físico, modelado a 1000 Hz, banco de trabajo virtual y controlador de vuelo integrado. Diseña, ajusta y analiza builds reales antes de tocar hardware.
Ver en SteamUn laboratorio de cuadricópteros con enfoque físico, modelado a 1000 Hz, banco de trabajo virtual y controlador de vuelo integrado. Diseña, ajusta y analiza builds reales antes de tocar hardware.
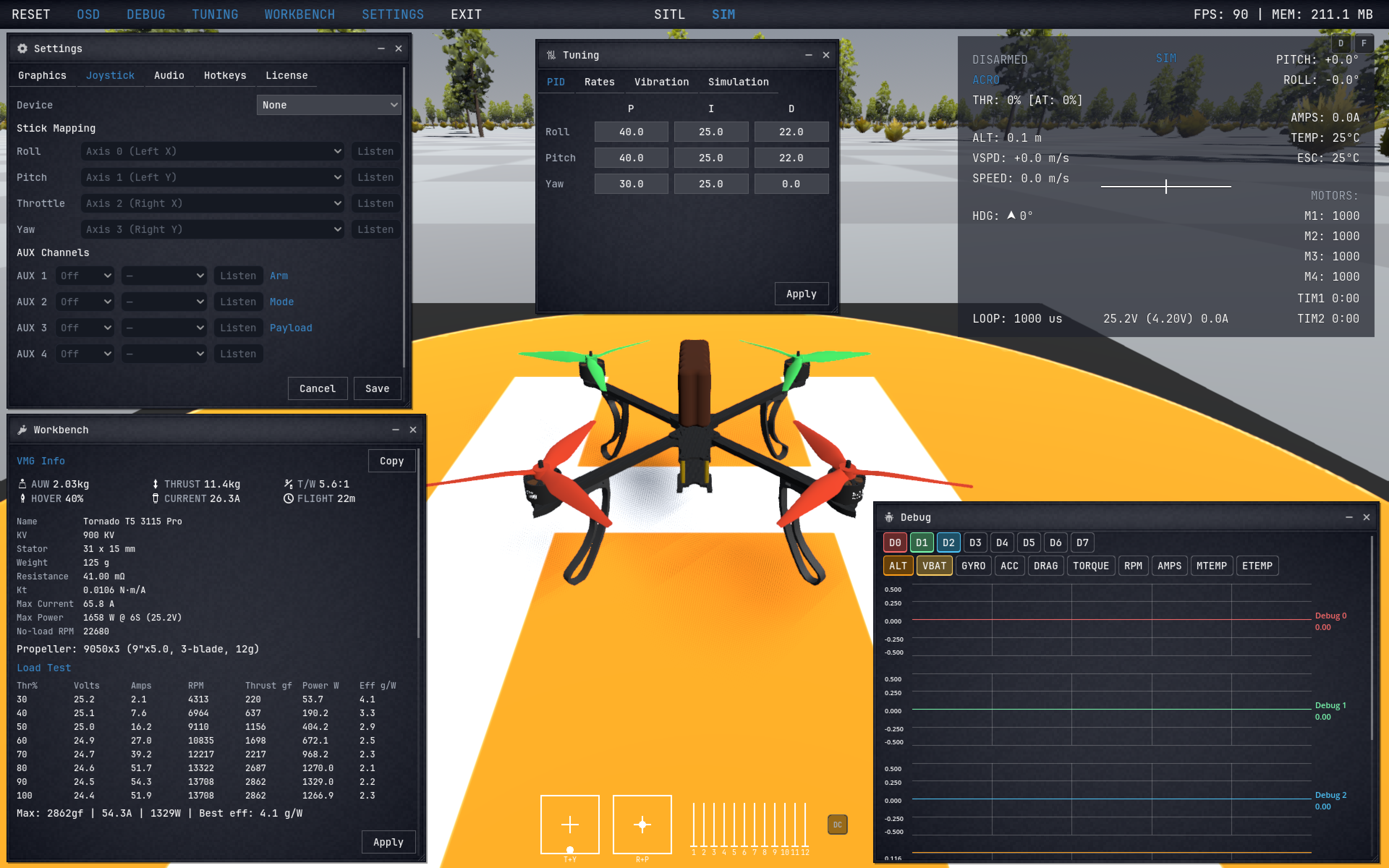
Ver en SteamSITL Forge es un simulador de cuadricópteros con enfoque en la física y un banco de trabajo de ingeniería. Motores, hélices, baterías y ESCs se modelan a partir de mediciones reales de banco a 1000 Hz — el vuelo simulado refleja las tendencias que verías en hardware real.
Valida builds, optimiza la eficiencia y aprende a tunear el vuelo con feedback realista — sin crashes, sin componentes quemados y sin gastar dinero de más.
Hecho para builders que quieren saber qué hará su dron antes de soldar nada.
Prueba combinaciones de motor y hélice contra ajustes con datos reales de banco antes de gastar dinero en hardware que quizá no encaje en tu build.
Relación empuje/peso, consumo de corriente, gas de hover y tiempo de vuelo predichos a partir de specs reales — sin adivinar.
Comprueba configuraciones con payload y builds de airframe pesado de forma segura antes de arriesgar motores, ESCs o baterías reales.
Cambia un motor, hélice o batería y verás el empuje, la corriente y el tiempo de vuelo recalcularse al instante — sin soldar, sin esperar piezas.
Itera sobre PIDs, rates y filtros con feedback sin riesgo — sin crashes, sin motores quemados, sin hélices rotas.
Vectores de fuerza, caída de tensión, vibración, temperaturas de ESC y motor — todas las variables observables en tiempo real, no enterradas en una caja negra.
Un simulador base más DLC opcionales que sirven de puente a firmwares reales de controladores de vuelo. Cada DLC se vende por separado.

La app base. Diseña, ajusta y prueba builds reales de cuadricópteros antes de tocar hardware — cada componente ajustado a mediciones reales de banco a 1000 Hz.

Puente software-in-the-loop al firmware Betaflight. Reemplaza el controlador PID integrado por el firmware real ejecutándose en tu PC, así tuneas contra el mismo código que corre en tu dron.
Tienda Steam
Puente software-in-the-loop al firmware INAV. Navegación GPS, misiones por waypoints y pruebas de vuelo autónomo — el mismo enfoque físico.
Tienda SteamPuente software-in-the-loop al firmware ArduPilot. Configuraciones multirrotor, ala fija y VTOL con integración completa de MAVLink.
Banco de trabajo de ingeniería, tuning en tiempo real e integración directa con firmware — todo sobre el mismo núcleo físico.
Todos los productos comparten el mismo núcleo físico — calibrado, reproducible y construido para la precisión.