Ein physikorientiertes Quadrocopter-Labor mit 1000 Hz Modellierung, virtueller Werkbank und eingebautem Flight Controller. Entwirf, tune und analysiere echte Drohnen-Builds, bevor du Hardware in die Hand nimmst.
Auf Steam ansehenEin physikorientiertes Quadrocopter-Labor mit 1000 Hz Modellierung, virtueller Werkbank und eingebautem Flight Controller. Entwirf, tune und analysiere echte Drohnen-Builds, bevor du Hardware in die Hand nimmst.
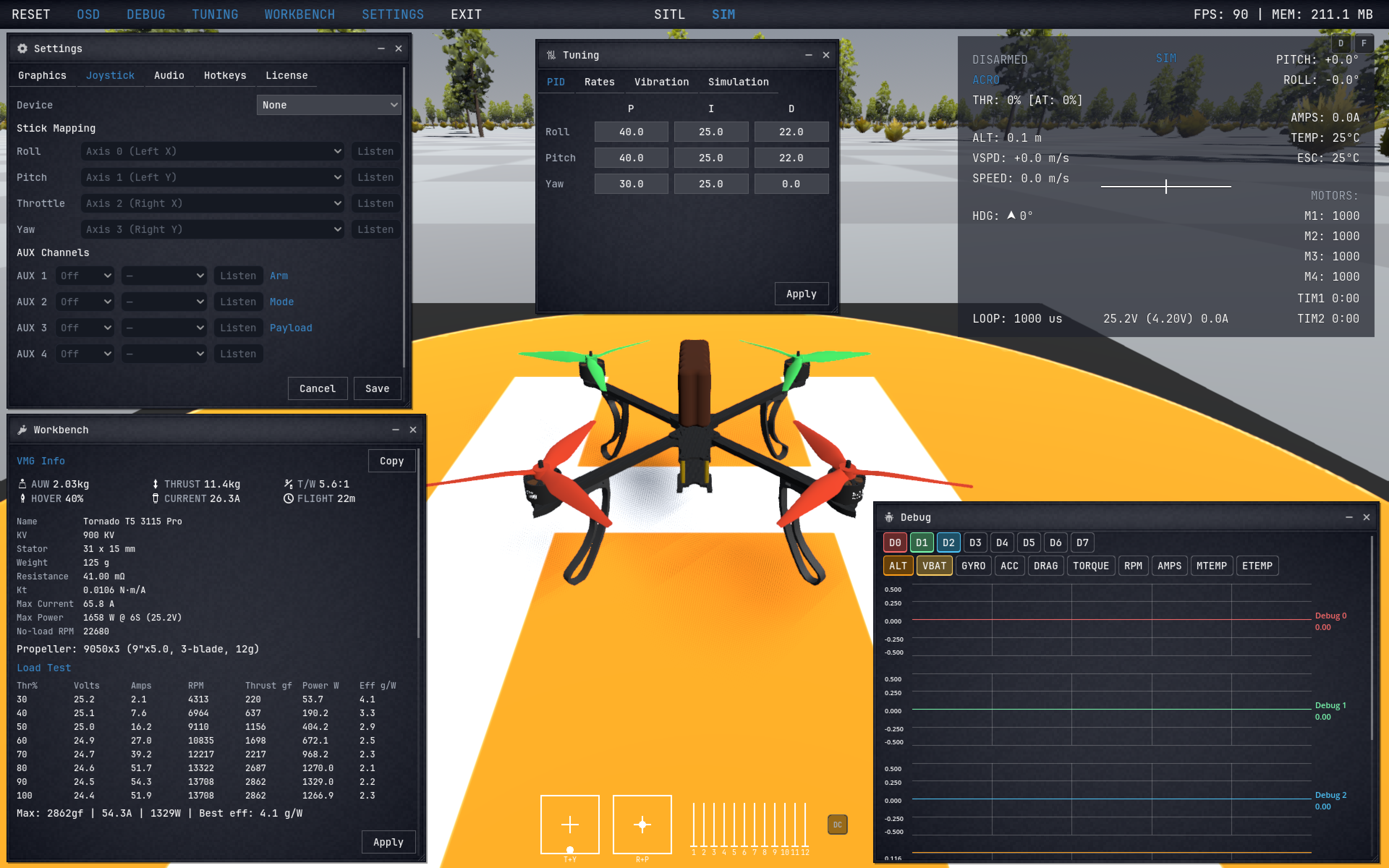
Auf Steam ansehenSITL Forge ist ein physikorientierter Quadrocopter-Simulator und Engineering-Workbench. Motoren, Propeller, Akkus und ESCs werden aus echten Prüfstandsmessungen mit 1000 Hz modelliert — simulierte Flüge zeichnen die Trends nach, die du auch auf echter Hardware sehen würdest.
Validiere Builds, optimiere die Effizienz und lerne Flight-Tuning mit realistischem Feedback — ohne Crashes, ohne durchgebrannte Komponenten und ohne unnötige Ausgaben.
Gemacht für Builder, die wissen wollen, was ihre Drohne kann, bevor sie überhaupt zum Lötkolben greifen.
Probiere Motor- und Propellerkombinationen anhand echter Prüfstandsdaten aus, bevor du Geld in Hardware steckst, die nicht zu deinem Build passt.
Schub-Gewichts-Verhältnis, Stromaufnahme, Hover-Throttle und Flugzeit — vorhergesagt aus echten Spec-Daten, nicht geraten.
Prüfe Payload-Konfigurationen und schwere Airframe-Builds sicher, bevor du echte Motoren, ESCs oder Akkus riskierst.
Tausch einen Motor, Propeller oder Akku aus und sieh Schub, Strom und Flugzeit sofort neu berechnet — ohne Löten, ohne auf Teile zu warten.
Iteriere PIDs, Rates und Filter mit risikofreiem Feedback — keine Crashes, keine durchgebrannten Motoren, keine kaputten Propeller.
Kraftvektoren, Spannungsabfall, Vibration, ESC- und Motortemperaturen — jede Variable in Echtzeit beobachtbar, nicht in einem Black-Box-Modell vergraben.
Ein Basis-Simulator plus optionale DLC-Brücken zu echter Flight-Controller-Firmware. Jedes DLC wird separat verkauft.

Die Basis-App. Entwirf, tune und teste echte Quadrocopter-Builds, bevor du Hardware in die Hand nimmst — jede Komponente an echte Prüfstandsmessungen bei 1000 Hz angepasst.

Software-in-the-Loop-Brücke zur Betaflight-Firmware. Ersetzt den eingebauten PID-Controller durch die echte Firmware auf deinem PC, sodass du gegen denselben Code tunst, der auch auf deiner Drohne läuft.
Steam-Shop
Software-in-the-Loop-Brücke zur INAV-Firmware. GPS-Navigation, Waypoint-Missionen und autonome Flugtests — derselbe physikorientierte Ansatz.
Steam-ShopSoftware-in-the-Loop-Brücke zur ArduPilot-Firmware. Multirotor-, Starrflügler- und VTOL-Konfigurationen mit voller MAVLink-Integration.
Engineering-Werkbank, Echtzeit-Tuning und direkte Firmware-Integration — alles auf demselben Physik-Kern.
Jedes Produkt läuft auf demselben Physik-Kern — kalibriert, reproduzierbar und auf Präzision gebaut.