A physics-first quadcopter laboratory with 1000Hz modeling, a virtual workbench, and a built-in flight controller. Design, tune, and analyze real drone builds before you ever touch hardware.
View on SteamA physics-first quadcopter laboratory with 1000Hz modeling, a virtual workbench, and a built-in flight controller. Design, tune, and analyze real drone builds before you ever touch hardware.
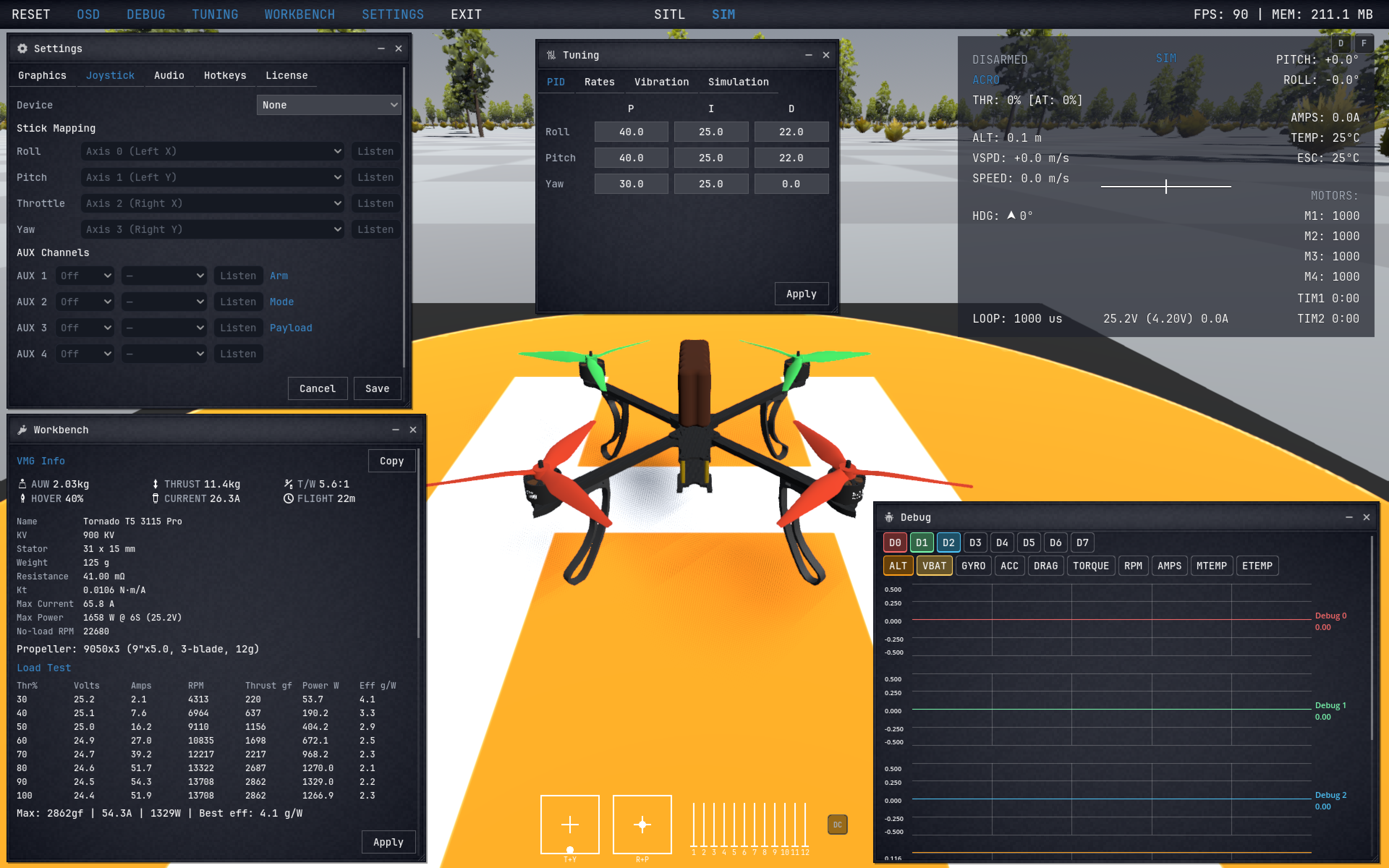
View on SteamSITL Forge is a physics-first quadcopter simulator and engineering workbench. Motors, propellers, batteries, and ESCs are modeled from real bench measurements at 1000Hz — simulated flight tracks the trends you'd see on real hardware.
Validate builds, optimize efficiency, and learn flight tuning with realistic feedback — without crashes, burned components, or wasted money.
Built for builders who want to know what their drone will do before they solder anything.
Try motor and prop combinations against real bench-data fits before spending money on hardware that may not fit your build.
Thrust-to-weight, current draw, hover throttle, and flight time predicted from real spec data — not guesswork.
Check payload configurations and heavy-airframe builds safely before risking real motors, ESCs, or batteries.
Swap a motor, prop, or battery and see thrust, current, and flight time recalculate instantly — no soldering, no waiting on parts.
Iterate on PIDs, rates, and filters with risk-free feedback — no crashes, no burned motors, no wasted props.
Force vectors, voltage sag, vibration, ESC and motor temps — every variable observable in real time, not buried in a black-box model.
A core simulator plus optional DLC bridges to real flight-controller firmware. Each DLC is sold separately.

The base app. Design, tune, and test real quadcopter builds before you touch hardware — every component fitted to real bench measurements at 1000Hz.

Software-in-the-loop bridge to Betaflight firmware. Replaces the built-in PID controller with the real firmware running on your PC, so you tune against the same code that runs on your drone.
Steam Store
Software-in-the-loop bridge to INAV firmware. GPS navigation, waypoint missions, and autonomous flight testing — same physics-first approach.
Steam StoreSoftware-in-the-loop bridge to ArduPilot firmware. Multirotor, fixed-wing, and VTOL configurations with full MAVLink integration.
Engineering workbench, real-time tuning, and direct firmware integration — all on the same physics core.
Every product runs on the same physics core — calibrated, reproducible, and built for precision.